در مرکز آموزش علمی کاربردی کمپرسورسازی تبریز؛
کوادکوپتر چهارموتوره به همت محققان تبریزی طراحی و ساخته شد
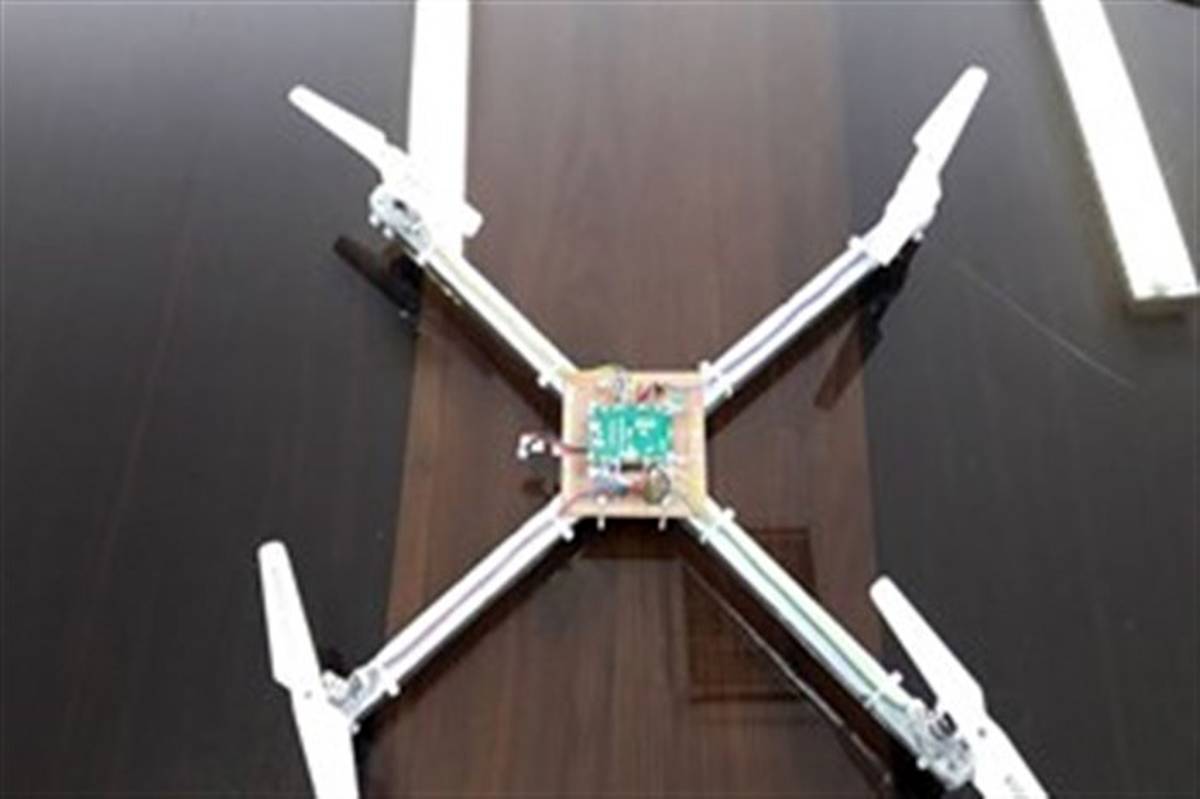
تبریز(پانا)- محققان مرکز آموزش علمی کاربردی کمپرسورسازی تبریز در راستای تحقق حمایت از کالای ایرانی موفق به طراحی و ساخت کوادکوپتر چهارموتوره(پهپاد) با قابلیت نصب و حمل انواع دوربین تصویربرداری، فیلمبرداری و ارسال همزمان شدند.
یکی از اعضای گروه سازنده این طرح، هدف از اجرای آن را بهکارگیری آموختهها و طرح دانش فنی ایجاد شده توسط اعضای گروه در رشته تحصیلی مهندسی فناوری کنترل ابزار دقیق و تشویق دیگر دانشجویان به کار عملی و مهارتی عنوان کرد.
بهنام موسیپور با بیان اینکه مجری طراحی و ساخت کوادکوپتر چهار موتوره مرکز آموزش علمی کاربردی کمپرسورسازی تبریز بوده است، افزود: این کوادکوپتر این قابلیت را دارد که با نصب و حمل انواع دوربینها با پرواز بر روی اهداف مورد نظر از آن ها فیلمبرداری کرده و همزمان ارسال کند.
وی با بیان اینکه طرح اولیه این کوادکوپتر چهار موتوره طراحی و ساخته شده و در مرحله آزمایش قرار دارد، خاطرنشان کرد: افزایش برد پروازی، نصب انواع دوربین بر روی آن و انتقال همزمان تصاویر به سرور از دیگر قابلیتهای کوادکوپتر چهار موتوره ساخته شده است.
وحید نقیزاده دیگر اعضای گروه سازنده این کوادکوپتر چهار موتوره مرکز آموزش علمی کاربردیکمپرسورسازی تبریز نیز گفت: کوادکوپتر یک ربات پرنده بدون سرنشین چهار موتوره است که توانایی پروازهای خاص و قدرت مانور فوقالعادهای را داراست.
وی با اشاره به اینکه طراحی و ساخت این پرنده بر خلاف ظاهر ساده خود بسیار پیچیده است، بیان داشت: این پرندهها قادر به انجام عملیاتی از قبیل گشتهای هوایی، عکسبرداری، ردیابی اهداف زمینی، جنگ الکترونیک، عملیات انتحاری، مسابقات ورزشی و … استفاده کرد.
تقی زاده افزود: کوادکوپترها یک ربات پرنده بدون سرنشین است که با بهرهگیری از چهار موتور و پره مجزا و چرخش دو به دو معکوس این موتورها نیروی گشتاورهای ایجاد شده را خنثی میکنند همچنین اختلاف فشار لازم برای ایجاد نیرو را تأمین میکنند.
این پژوهشگر مرکز آموزش علمی کاربردی کمپرسورسازی تبریز با تاکید بر اینکه در ساخت این نوع کوادکوپترها تلاش بسیاری برای کاهش وزن و کنترلپذیری بیشتر آن انجام میشود، اضافه کرد: باید حداقل دو برابر وزن کوادکوپتر، توسط موتورها ایجاد شود و این حداقل ضریب اطمینان است.
تقی زاده افزود: این نوع پرندهها را میتوان به صورت راه دور توسط یک اپراتور کنترل کرد و یا میتوان به صورت کنترل خودکار از طریق مسیرهای پیش برنامهریزی شده به پرواز در آورد.
ارسال دیدگاه